
智能LED驅動電路系統是基于風能和太陽能發電系統而改進設計的。其中,風電和光伏發電賦予了較高的優先級,在兩種能源不足以供給照明時,再采用市電提供電源。由于受天氣、時間、地域條件的改變,太陽能和風力資源有著不同的分布,為達到最大的風能光能利用率,采用了風光互補系統,并進行MPPT控制策略改進能源輸入方案。單片機控制系統可對多路電源輸入進行控制,按一定的優化方案執行對驅動電路供電。因為未采用單一能源的電力供應,為使風力發電和太陽能發電達到最大功率,MPPT控制策略扮演了重要角色。文中將綜合太陽能電池板和風力發電機組的特點,分析它們的輸出功率特性,以優化的風光電源對蓄電池的充電過程。在單片機智能控制系統的控制下,建立一個合理的解決方案,提供一個恒流電源以滿足項目設計要求。
1 多路輸入驅動LED基本方案
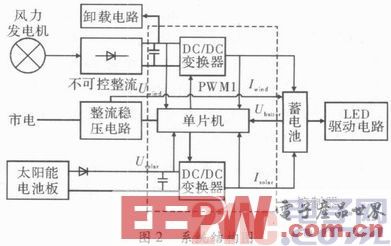
LED智能驅動電路系統的結構圖如圖1和圖2所示。系統由負載、控制器、驅動電路、風力發動機、太陽能電池板、蓄電池和市電組成。
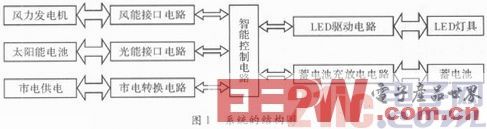
多路輸入就是以市電、太陽能電池板和蓄電池作為電源動力,在實際工況中經常遇到,因為市電下很多路燈的工作情況不太穩定或者斷電,這樣需要照明時經常停電影響交通,這時可以通過太陽能或蓄電池進行供電,即在驅動電路里面加入選擇判斷電路組成多輸入控制選擇器。同時利用MPPT控制方式,實現最大限度的能源利用。通過對風機發電和光伏發電的控制調節,若發電電能未能供給所有電氣負載時,風光互補控制器將傳送給負載蓄電池電能。反之,控制器控制電路直接供給負載電能,并將剩余電能充電至蓄電池內。同時控制器保護蓄電池,使其工作在合理的電壓區域內,確保蓄電池安全穩定的工作。
2 MPPT控制方案
2.1 風力發電特性原理
由流體力學中氣流動能公式可以得出采用氣流所具風能的大小同通過的面積、氣流密度以及氣流的速度成正比關系

由于風力發電機在發電風能利用率的局限性,無法做到自然風能的全部利用,所以在計算風機實際有用功率輸出時需要考慮留在尾流中未利用的動能,基本公式為

上式,一般情況下Cp<0.593,其表示風力發電機的實際風能利用系數,可由貝茲(Betz)極限理論得到。風能的利用系數Cp與風力機的葉尖速比有關,葉尖速比一般用λ來表示,由風力機葉尖旋轉的圓周速度和風速的比值來確定

圖3給出了風能的利用系數和葉尖速比的曲線關系,是風力機的基本特性之一。
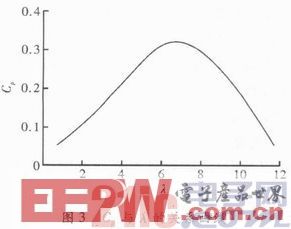
在λ處于某一特定值λ0時,就定漿矩風機而言,Cp達到最大并且風力機具有最大機械功率的輸出,最佳葉尖速比用λm表示。因自然風具有不定隨時變化的特性,這會使得Cp在大多數情況下不在最大工作點上,此時,風機的效率經常處在較低水平。對于這個問題,處理時需要控制風力發電機的運行速度,在一個較大的風速范圍內,盡可能使風能的利用系數在最大值附近運行,且葉尖速比λ達到最為優化的葉尖速比,以實現風電轉換最高效率的跟蹤。
2.2 太陽能電池板特性
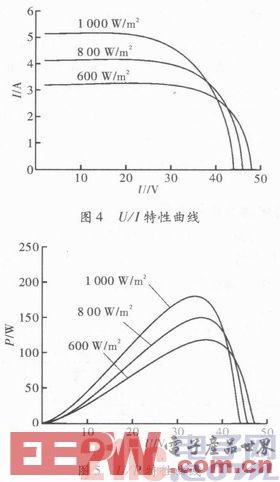
太陽能電池的功率特性非線性化較為明顯,容易被外界因素影響。不同日照下表現出的電壓/電流和電壓/功率特性,如圖4和圖5所示。
2.3 變步長擾動最大功率點搜索控制
通過分析風力發電機的輸出特性,可采用3種方式確定其最大功率點:擾動搜索其最大功率點、控制功率信號、控制葉尖速比。因為要借用風速計,使得葉尖速比控制成本較高,它主要應用于大型風機控制。為控制功率信號,需要得到風力發電機的最大功率負載曲線。采用最大功率點擾動搜索控制較為簡便。而太陽能MPPT的控制有恒定電壓控制法、最大功率點的觀察擾動法、導納增量法。
綜合考慮太陽能和風力發電機MPPT控制功能,本項目使用改變步長搜索擾動方法控制最大功率點,MPPT控制的關鍵是如何使最大充電功率電池電壓平穩,同時電池充電和發電部分功率相等。檢測電池的充電電流以及電壓,能夠計算得到此時的電能利用率。
當系統運行時,控制信號起始基準功率為Pa,其占空比為x,輸入一個擾動△x,Pb為檢測擾動后的功率。當Pb>Pa時,證明擾動方向無誤,保持同方向施加擾動已搜尋最大功率點;反之,反方向擾動。雙向擾動之后,判斷Pb和Pa,若檢測擾動后的功率Pb小于等于起始基準功率Pa,繼續減小擾動幅度,并再次進行雙向搜索,當擾動△x
2.4 蓄電池充電控制優化
合理的蓄電池充放電,不僅可以延長電池壽命,而且能提升系統的穩定性。文中使用了3級充電控制的12 V鉛酸蓄電池。在蓄電池的初始充電,即利用最大功率點跟蹤控制充電階段,此時電池電壓較小,一個大的MPPT控制被使用。當充電電流大于蓄電池的最大充電電流時,就不再使用最大功率點跟蹤最大電流充電。一旦蓄電池的最大充電功率比風力發電機和太陽能電池提供的功率大時,打開卸荷回路,使蓄電池的充電電流始終小于最大充電電流。
在充電過程中,蓄電池充電到各個階段,可以不使用最大功率充電,放棄上述MPPT控制,采用電壓環控制。此階段控制參考對象選定為降壓/升壓型轉換器的輸出電壓,從而使蓄電池在定壓條件下充電。此時,充電電流逐漸變小。當充電電流減小到1 A時,蓄電池進入浮充階段。采用輸出電壓恒定的控制轉換器,使蓄電池以較小的放電電流來補償功率損耗。利用這個次優控制,可使能源得到充分利用,且在不損害蓄電池的前提下,有效地提高電池的充電效率。
3LED驅動電路設計
該驅動電路是恒流驅動電源,專為T10LED燈設計,可驅動400余盞白色光LED燈或600余盞的紅黃色LED燈管。產品采用特殊的控制開關方式以及非隔離的外觀設計,使其具有高效率,節約能源,綠色環保等方面的優勢。經過研究和物理測量電路,驅動電路具有以下特點:工作頻率50~60 Hz;功率24 W;寬輸入電壓AC 110 V~265 V/50~60 Hz,輸出電流0.24 A,輸出電壓36 V≤UOUT≤0.6Uin;體積175mm× 18 mm×11 mm;直流50~80 V。確保LED使用安全穩定,完全控制LED電流,同時LED光衰減弱,恒流精度高,開路保護功能,電磁兼容性較好。高效率、低功耗、穩定性好的開關控制芯片,使產品擁有綠色節能的特性。
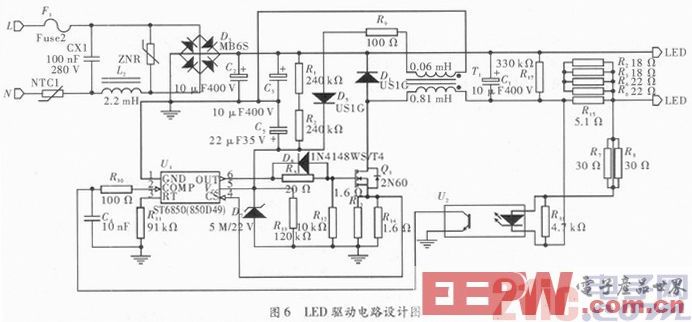
電流采用交流電接入,通過橋式整流器,電流直接被送到LED負載的正極,然后通過負極經變壓器回到晶體管Q1,最后又通過橋式整流器回到交流的陰極。這就是該電路有負載時的主要回路。當沒有負載時R17就充當了保護電路的負載,保證電路不會短路。C1在這里起到了濾波和以充放電的形式來平衡負載LED兩端電壓的作用。D1為蓄流二極管,保證變壓器正常工作。電路圖下半部分,主要由兩個芯片和Q1過程的反饋調節電路。Q1會根據U1發出的高速頻率快速地開關電路,對變壓器發出高頻電流,從而使該電路輸出高頻電流。反饋控制:當負載LED電流過載時,電流會通過R7和R8到達U2,使U2右邊的二極管發熱,使U2左邊的電壓降低,同時反饋到U1,即可調節電壓和頻率控制電路,從而使驅動電路輸出恒定電流。
4 結束語
文中采用多路輸入的方式,經控制器智能操控后對大功率的LED燈提供電能。同時還考慮了在風光互補供電系統中常用的MPPT控制策略,使用MPPT策略以獲得風光發電的最大功率值,對蓄電池充電進行分段優化,提高能源利用率,得以實現節能環保的目的。



